
No curso da evolução, alguns animais (inclusive o ser humano) passaram a apresentar olhos posicionados na frente da cabeça. Esses animais perderam o incrível campo visual de, praticamente, 360 graus, proporcionado pela posição lateral, e oposto dos olhos.
Por outro lado, eles adquiriram uma nova função: a visão binocular ou estereoscopia ("visão sólida" em
grego) [Fontoura, 2001].
Mesmo essa tecnologia sendo mais conhecida atualmente os seus estudos já despertam o interesse da humanidade desde o tempo dos gregos, onde o filosofo Euclides já havia despertado o interesse quanto à visão binocular.
Esses interesses não eram apenas dos gregos, os árabes desenvolveram técnicas de desenho e noções de perspectiva e até mesmo grandes estudiosos como Leonardo Da Vinci e Kepler e mestres como Giotto Caravaggi estudaram sobre ilusão de imagens e elementos que se projetavam de suas telas.
A base para a percepção estereoscópica é a disparidade binocular do sistema visual humano, que gera duas imagens ligeiramente diferentes quando uma cena é projetada nas retinas dos olhos. As duas perspectivas diferentes das imagens são fundidas no córtex visual do cérebro, de forma a compor uma simples visão estereoscópica (tridimensional). Esse processo pode ser simulado através de duas câmeras organizadas com a mesma distância interocular dos olhos humanos.
Logo, colocando-se as câmeras separadas uma da outra com base nessa distância, simula-se o sistema visual humano.
Quando cada imagem das câmeras for apresentada ao seu olho correspondente, as duas imagens serão fundidas em uma única imagem pelo cérebro, produzindo a ilusão de visão estereoscópica [Johanson, 2001].
As imagens assim formadas, são denominadas estereogramas e de acordo com Steven Pinker [...] Entender o estereograma não é apenas um bom modo de compreender o funcionamento da percepção, mas também um deleite para o intelecto. Os estereogramas são mais um exemplos dos maravilhosos dispositivos da seleção natural, nesse caso dentro de nossa cabeça.
Os auto-estereogramas exploram não uma, mas quatro descobertas sobre como enganar o olho. A primeira, por estranho que pareça, é a imagem.
Estamos tão embotados com fotografias, desenhos, televisão e filmes de cinema que esquecemos que tudo isso não passa de uma ilusão benigna.
Manchas de tinta ou pontos bruxuleantes de fósforo podem nos fazer rir, chorar e até mesmo sentir excitação sexual.
Os humanos vêm produzindo imagens há pelo menos 30 mil anos e, contrariamente a um folclore da ciência social, a capacidade de vê-las como representação é universal”.(Como a mente funciona. Pinker.S, pág 230-231)
Portanto, pode-se inferir que o homem no processo de desenvolvimento das formas de representação do mundo ao seu redor, criou a técnica do estereograma para entender e provocar excitações visuais
Mesmo essa tecnologia sendo mais conhecida atualmente os seus estudos já despertam o interesse da humanidade desde o tempo dos gregos, onde o filosofo Euclides já havia despertado o interesse quanto à visão binocular.
Esses interesses não eram apenas dos gregos, os árabes desenvolveram técnicas de desenho e noções de perspectiva e até mesmo grandes estudiosos como Leonardo Da Vinci e Kepler e
mestres como Giotto Caravaggi estudaram sobre ilusão de imagens e elementos que se projetavam de suas telas.

The Epiphany
Os primeiro registros sobre estudos relacionados a essa tecnologia datam do séc.XIX, em 1838 onde o cientista Sir Charles Wheatstone criou o estereoscópio que é um dispositivo de conversão de imagens 2D em imagens 3D, a partir de uma certa combinação entre prismas e espelhos. Esse aparelho já demonstrou que era possível a partir da combinação de duas imagens para formar outra imagem com a noção de profundidade e tridimensionalidade.
Em 1849, o cientista escocês David Brewster, inventou a o estereoscópio com as lentes prismáticas.
Em 1850 Joseph D'Almeida inventou o anaglifo.

Sistema anaglífo
Esse sistema é o mais conhecido atualmente devido a sua simplicidade, onde o par estéreo é desenhado de duas cores diferente (vermelho e azul) e elas são separadas por óculos com as cores
correspondentes.
Esse sistema apenas foi patenteado nos anos de 1891, por Louis Arthur Ducos du Hauron.
A estereoscopia está relacionada à capacidade de enxergar em três dimensões, isto é, de perceber a profundidade.
O princípio de funcionamento da maioria dos dispositivos estereoscópicos é o oferecimento de imagens distintas aos olhos esquerdo e direito do observador, proporcionando sensação de profundidade, tal qual quando se observa um objeto real.
Em 1859, o medico americano Dr. Oliver Wendell Holmes, ampliou a qualidade do estereoscópio utilizando copias fotográficas de pares estereoscópicos.
Em 1889, foi criado o primeiro filme em anaglifo foi produzido por William Frise Green.
O cinema 3D passou a ser um sucesso no inicio do sec. XX.
Podemos dizer que "um visor estereoscópico é um sistema óptico cujo componente final é o cérebro humano" [StereoGraphics 1997].
Em 1903 Frederic Eugene Ives, patenteou depois de estudos um método que permite a visão estereográfica sem a utilização de óculos, e esse sistema e nomeado como Parallax Stereogram, que se baseia em uma técnica que é constituída de imagens da esquerda e da direita divididas em tiras verticais e alinhados a partir de uma serie de filetes opacos alinhados verticalmente e com a mesma frequência e com fendas livres menores em larguras pelas quais as imagens eram visualizadas pelos olhos.
Óculos Obturadores Sincronizados
Esta técnica, também denominada Estéreo Ativo, o observador, ao visualizar a tela do computador ou televisor, deve utilizar óculos especiais, cujas lentes são feitas de cristal líquido.
As lentes podem ficar instantaneamente transparentes ou opacas de acordo com um controle eletrônico.
Esse controle é sincronizado com sinal de vídeo, de forma a deixar, por exemplo, opaca a lente da esquerda e transparente a da direita quando estiver sendo exibido, na tela, o quadro referente ao olho direito e vice-versa.
O sinal de vídeo deve apresentar, na seqüência, as imagens esquerda e direita em sincronismo. Como as taxas de atualização das imagens no vídeo são suficientemente rápidas (60Hz para cada olho), o resultado é que cada olho enxerga uma imagem diferente, resultando no efeito estereoscópico.
De forma alternativa, o sinal de vídeo pode ser entrelaçado (linhas pares mostram a imagem esquerda e linhas ímpares mostram a imagem direita), reduzindo o cintilamento da imagem. Existem hoje no mercado diversos óculos obturadores.
Os de custo mais elevado são controlados por um emissor de infravermelho que realiza a obturação das lentes dos óculos. A Figura apresenta um exemplo de óculos obturadores de custo mais
elevado.

Aqueles de baixo custo têm seu controlador conectado ao microcomputador ou à fonte de vídeo e
permitem a visualização em estéreo no monitor de vídeo ou na televisão [Santos, 2000].
A Figura abaixo mostra um exemplo dos óculos obturadores de baixo custo.

Estéreo Passivo
A primeira categoria abordada é o estéreo passivo. Nesta categoria, as duas imagens são exibidas simultaneamente e os óculos atuam como filtros.
O estéreo anáglifo (do inglês anaglyph) é o exemplo mais comum e muito usado nos cinemas antigamente. Neste estéreo, a filtragem é feita por cores, inicialmente na utilização desse estéreo, eram utilizadas apenas duas cores: vermelho e azul.
Isto é, a imagem para o olho esquerdo tinha apenas componente de cor vermelha e a imagem para o olho direito componente azul, como ilustrado na figura colocada no início.
Atualmente adicionou-se a componente verde para um dos olhos para melhorar a qualidade da imagem, pois era restrita apenas a dois canais de cores. Exemplo: de uma imagem com a componente verde adicionada é vista na figura abaixo

As vantagens desse tipo de estéreo são:
1. Necessita apenas um projetor ou monitor;
2. Pode ser impressa;
3. Baixo custo – os óculos são facilmente confeccionados.
A desvantagem principal é a perda de qualidade que a coloração impõe.
Uma solução alternativa é a filtragem por espectro de cores. Exemplo dessa alternativa é o ChromaDepthTM [Chromatek 2003]. Nessa solução, as lentes dos óculos refratam a luz conforme o espectro de cores.
Exemplo de imagem gerada para este tipo de estéreo é visto na figura abaixo.

Exemplo de imagem para estéreo por espectro de cor.
Porém, este modo de exibição apresenta o problema de estar vinculado a uma tabela de cor, conforme o gráfico abaixo:

Conforme mostra o gráfico, objetos ou partes que tenham cores quentes (próximas ao vermelho) estarão mais próximas do observador do que as cores frias (próximas ao azul), conforme pode-se notar na figura acima.
Isto impossibilita seu uso, por exemplo, em visualização científica, pois a tabela de cores é em função de propriedades existentes ao longo dos objetos da cena e não em função à distância do usuário.
Esta técnica funciona apenas para imagens estáticas – cenas e câmera sem alterações.
A vantagem é possibilidade de impressão.
Display Autoestereoscópico
Nos displays autoestereoscópicos, as visões esquerda e direita são multiplexadas espacialmente, permitindo ao observador visualizar uma imagem tridimensional sem a necessidade óculos especial. Cada imagem do par estéreo é "fatiada" e reside sobre as colunas pares e ímpares do monitor.As fatias são, direcionados para o olho do observador por meio de uma película lenticular colocada na superfície do monitor (Figura 11.19) ou pelo cálculo de distância e posicionamento dos olhos do observador.
Maiores detalhes podem ser encontrados em Perlin (2000 e 2001) e em Dodgson (1998).

Figura - Display Autoestereoscópico.
Fundamentos estereoscópicos
Conforme citado anteriormente, existem diferenças entre imagens formadas nas retinas de cada olho quando sobrepostas. Estas diferenças são na direção horizontal.
A disparidade é zero para objetos onde os olhos convergem. Já a paralaxe é a distância entre os pontos correspondentes das imagens do olho direito e do esquerdo na imagem projetada na tela. Em outras palavras, disparidade e paralaxe são duas entidades similares, com a diferença que paralaxe é medida na tela do computador e disparidade, na retina. É a paralaxe que produz a disparidade, que por sua vez, produz o estéreo. Os três tipos básicos de paralaxe são:
• Paralaxe zero: conhecida como ZPS (do inglês Zero Paralax Setting). Um ponto com paralaxe zero se encontra no plano de projeção, tendo a mesma projeção para os dois olhos (Figura (a) ).

• Paralaxe negativa: significa que o cruzamento dos raios de projeção para cada olho, encontra-se entre os olhos, e a tela de projeção, dando a sensação de o objeto estar saindo da tela (b).
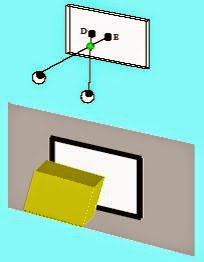
Figura b
• Paralaxe positiva: o cruzamento dos raios é atrás do plano de projeção, dando a sensação de que o objeto está atrás da tela de projeção (Figura (c) ).

Figura c
Para a visualização das imagens de vídeo produzidos com o efeito estereoscópico, foi criado o sistema
TecStereoPlayer que é um tocador de vídeos com estereoscopia visual. O TecStereoPlayer apenas exibe .O desenvolvimento do TecStereoPlayer objetivou-se em suportar diversos formatos de vídeos estéreos [Lipton 1997] e exibir também em diversos dispositivos estéreos, transformando as imagens do vídeo quando necessário.
Os dispositivos suportados pelo TecStereoPlayer são:
• Placas gráficas com suporte ao OpenGL [OpenGL 2004] estéreo: neste caso, existem 4 buffers, chamados de QuadBuffer - dois para cada olho.
Os óculos podem ser ligados diretamente à placa através de fios, eliminando a presença do emissor.
Neste caso, geralmente, apenas um usuário pode utilizar o sistema por vez. Algumas placas suportam a utilização de emissores.
O TecStereoPlayer divide as imagens de cada imagem do vídeo para cada buffer de trás de cada olho. Depois de preencher os dois buffers traseiros, é realizado o SwapBuffers.
Os sistemas baseados em monitor fazem uso de monitores convencionais das estações de trabalho para a visualização dos ambientes virtuais. São considerados não imersivos porque o campo de visão do usuário (no ambiente virtual) é limitado às dimensões do monitor, que geralmente não passam de algumas dezenas de polegadas.
É possível obter a estereoscopia neste tipo de sistema através de óculos ativos ou dos monitores auto-estéreos, mencionados anteriormente.
Apesar das limitações no que diz respeito ao sentimento de imersão, este tipo de sistema traz pelo menos duas vantagens: o custo reduzido e a facilidade de interação, pois o usuário não perde contato com o mundo real, podendo usar os dispositivos convencionais de interação, como teclado, mouse e joystick.

Monitor DTI – estéreo dispensando o uso de óculos.
Com o avanço da tecnologia, alguns monitores com display de cristal líquido estão permitindo a visualização estéreo sem uso de óculos, separando colunas pares para um olho e ímpares para o outro. O problema maior é a característica de ser mono usuário. Exemplo desses monitores é o fabricado pela DTI [DTI 2004], [About.com 2004]
• Monitores autoestereoscópico: para estes monitores, como mencionado anteriormente, não é necessária a utilização de óculos.
O TecStereoPlayer destina cada imagem de cada olho para um dos seus formatos internos e, através de uma comunicação via saída serial, é passado ao monitor o formato utilizado.
• VRex: são projetores capazes de realizar estéreo ativo e passivo, não simultaneamente.
O formato exigido por este projetor é o entrelaçamento de colunas.
Isto é, a imagem destinada para o olho da esquerda é distribuída pelas colunas pares da imagem enviada ao projetor e a imagem destinada para o olho da direita pelas colunas impares.
Através de um equipamento ligado entre a placa de vídeo e o projetor, permite-se também a utilização do estéreo do OpenGL através de uma entrada de S-Video.
O TecStereoPlayer também reproduz na forma de anáglifos, permitindo a visualização com óculos com filtros de cores em qualquer display ou dispositivo de projeção.
Com o avanço progressivo da tecnologia relacionada à apresentação de imagens, adentramos na área da realidade virtual.
O termo Realidade Virtual (RV) foi cunhado no final da década de 1980 por Jaron Lernier (Biocca, 1995) artista e cientista da computação que conseguiu unir dois conceitos contrários entre si, em um novo e promissor conceito, com capacidade de fazer a captação da essência dessa tecnologia, que é a busca do amálgama entre o real e o virtual.
No entanto, foi muito antes da denominação definitiva que surgiram as primeiras propostas e os primeiros resultados que alicerçaram a Realidade Virtual. Na década de 1960, logo após criar o Sketchpad, sistema com o qual fincou as base do que conhecemos como computação gráfica, IvanSutherland passou a trabalhar no que chamou de “Ultimate Display”.(Parker, 2001) e produziu no final da década de 1960, o
primeiro capacete de realidade virtual. 
Realidade Virtual
Os sistemas parcialmente imersivos provêem um sentimento de imersão maior que os sistemas baseados em monitor.
Isso é alcançado por meio de sistemas de projeção compostos por uma ou mais telas de projeção ou vários monitores agrupados.
Como a área de projeção é maior que nos sistemas não imersivos, a imersão do usuário é maior e é
possível a participação de um número maior de pessoas.
Por outro lado, a maior área de projeção leva a uma exigência maior de desempenho das máquinas, pois quanto mais imerso está o usuário, maior é o desconforto causado por atraso na resposta do sistema. Tanto por causa das várias projeções utilizadas quanto por causa da necessidade de máquinas mais sofisticadas, esse tipo de sistema já é bem mais caro que os não imersivos.
Em sistemas parcialmente imersivos o usuário começa sair do mundo real em direção ao virtual.
Assim, dispositivos de interação diferentes de teclado e mouse podem ser necessários.
Os sistemas de RV imersivos são aqueles que envolvem completamente o usuário, fazendo com que ele perca o contato visual com o mundo real. Capacetes e CAVEs [Cruz- Neira et al. 1993]
Com relação à estereoscopia, ela deve ser tratada com cuidado em todos os tipos de sistemas acima mencionados, para que ela não comprometa a imersão.
Nos sistemas baseados em monitor e nos parcialmente imersivos, a existência de uma área de projeção limitada pode causar a perda do estéreo caso os objetos cruzem a borda da tela.
Nos sistemas imersivos e parcialmente imersivos, a violação da estereoscopia também pode ocorrer quando os objetos virtuais aparecem muito próximos do usuário (entre sua mão e a tela e projeção). Nesse caso, a informação da estereoscopia indica que o objeto deveria encobrir a mão do usuário, mas na verdade é a mão que encobre o objeto, projetado na tela.
Isso gera uma informação contraditória de profundidade, que não consegue ser tratada pelo cérebro.
Dispositivos de Entrada
Uma das conseqüências do advento da RV foi a necessidade de se redefinir o paradigma de interface homem-computador. O sistema tradicional mouse-teclado-monitor foi substituído por dispositivos que permitissem maior imersão do usuário no ambiente virtual e o manuseio de todas as potencialidades dessa nova tecnologia [Silva et al. 2004].
Os dispositivos de entrada podem ser classificados em três tipos [Sherman e Craig 2003]: controladores físicos, de rastreamento de corpo e de reconhecimento de voz e som.
Os controladores físicos variam desde simples joysticks até complexos sistemas de simulação para aplicações específicas (por exemplo, um simulador de cabine de avião).
Esses dispositivos podem fornecer três tipos de informação para o sistema de RV: analógica, digital e posicional.
A informação analógica é gerada continuamente por um dispositivo, como por exemplo, o sinal enviado por um joystick quando sua haste é movimentada.
A informação digital é binária, como por exemplo, a gerada ao apertar um botão do joystick.
A informação posicional é obtida através dos dados vindos do dispositivo ou da conversão da
informação analógica.
O resultado é composto por três coordenadas de translação e pelos três ângulos de Euler, ou por um quatérnio [Foley et al. 1993].

Rotação usando ângulo de Euler
Há uma variedade de dispositivos de rastreamento, que utilizam várias tecnologias diferentes, entre eles, os eletromagnéticos, mecânicos, acústicos, inerciais e ópticos.
Os dispositivos ópticos normalmente usam técnicas de visão computacional para determinar a posição do objeto a partir da imagem obtida com câmera(s) de vídeo.
Outro equipamento óptico bastante utilizado é o composto por emissores de luz, como os diodos
(LEDs) ou laser.
Esse tipo de dispositivo tem como vantagem o baixo custo e a mobilidade que dá ao usuário (não possui fio).
A desvantagem é a velocidade de captura dependente do dispositivo utilizado (câmeras NTSC, por exemplo, capturam imagens a 30 quadros por segundo) e a precisão relativamente baixa (muito dependente da técnica de visão utilizada).
Uma outra restrição é que o objeto sendo rastreado deve sempre estar dentro do campo de visão da câmera.
Para reduzir essa limitação, são usadas câmeras adicionais, de modo a tentar ter objeto sempre dentro do campo de visão de pelo menos duas delas.

A figura ilustra o local preparado com quatro câmeras emissoras de infra-vermelho para capturar a posição de um dispositivo óptico sobre a mesa.
O dispositivo é recoberto com material retro-reflexivo, para retornar o sinal infravermelho na direção de cada câmera.
Como existem quatro câmeras, o sistema funciona enquanto o dispositivo é visto por duas ou mais
câmeras [Silva 2004].
Realidade Aumentada
A Realidade Aumentada (RA) é vista como uma variação da RV. Em RV, o usuário é imerso em um ambiente sintético e não participa do mundo real a sua volta.
A RA permite que o usuário veja o mundo real com objetos virtuais superpostos ou combinados com ele. Portanto, a RA suplementa a realidade, ao invés de substituí-la completamente.
Para o usuário, os objetos reais e os virtuais coexistem no mesmo espaço. A Figura mostra um

exemplo característico de RA onde objetos reais e virtuais compõem um ambiente, com as
informações virtuais se sobrepondo ao mundo real.
A possibilidade de combinar representações virtuais com o mundo real permite dar ao usuário informações adicionais sobre o mundo real que não podem ser obtidas pelos sentidos humanos. As aplicações possíveis para a RA envolvem, por exemplo o concerto de componentes internos de um sistema mecânico, cujas informações de manutenção são virtualmente mostradas sobre as peças a serem reparadas.
Na medicina, a RA também pode ser bastante útil, ao indicar, por exemplo, onde o cirurgião deve fazer a incisão em um paciente [Sherman e Craig 2003].
Os militares também têm empregado a RA no intuito de prover à tropa informações vitais sobre seus arredores.
Obviamente, a RA também tem grande potencial na educação e entretenimento.
Em um sistema de RA, a combinação da imagem real com a virtual pode ser feita por duas tecnologias: óptica e de vídeo [Rolland et al. 1994].
Os dispositivos mais empregados são os visores montados sobre a cabeça do usuário, sejam capacetes, monóculos ou outros.
Chamaremos, de forma genérica, esses dispositivos de capacete de RA. O sistema de RA deve alinhar os objetos virtuais com os reais Esse processo chama-se registro e é um dos problemas mais difíceis de se resolver em RA [Azuma 1997].
Tele-presença e Tele-imersão
Tele-presença ou tele-imersão é outro conceito freqüentemente associado à RV colaborativa.
Tele-presença envolve a habilidade de interagir (normalmente via computador) com um ambiente real remoto pelo ponto de vista do dispositivo remoto [Sherman e Craig 2003].
Esta tecnologia é ideal para o controle de robôs em ambientes hostis ou de difícil acesso para o homem (por exemplo, outros planetas, fundo do mar e interior de vulcões).
O usuário deve ser capaz de manipular o robô como se estivesse no ambiente remoto.
Outra aplicação da tele-imersão é a realização de cirurgias sem a presença física do cirurgião junto ao doente.
A tele-imersão está associada ao espectro de RV porque ela tem como objetivo fazer com que o usuário se sinta fisicamente presente em um ambiente remoto.
A presença é simulada ao usuário através de sistemas de feedback sensorial: transmissão de imagens, som e sensação táctil, de maneira similar a RV e RA.
Além disso, para interagir com o ambiente remoto, a tele-imersão necessita de sistemas para rastrear os movimentos do usuário, assim como em RV.
Portanto, a tele-imersão pode ser definida como uma combinação de técnicas de RV imersiva (rastreamento de movimentos e feedback sensorial) e de transmissão de imagens em tempo-real.
Um conceito muito próximo da tele-imersão é o de tele-operação.
Em ambos os casos, o usuário quer interagir com um ambiente remoto por meio de um dispositivo.
A diferença, é que na tele-operação, o usuário não tem a visão de primeira pessoa, isto é, a visão do dispositivo remoto (robô, por exemplo).
Tele-operação ocorre, por exemplo, ao pilotarmos um aeromodelo via equipamento de rádio.
Para termos tele-imersão nesse caso, seria necessária a transmissão de uma câmera na cabine do aeroplano para que o piloto (no chão) receba o que seria a visão do piloto.
Destarte, abro um parágrafo para inserir um trecho do livro “Muito além do nosso Eu” do Dr° Miguel Nicolelis pág 254-255 [...] “Na sala de controle, Jose Carmela passou o controle dos movimentos do cursor do joystick para o pulso do braço robótico controlado pela nossa interface cérebro-máquina. Isso implicou que, dali por diante, para mover aquele cursor na tela, interceptar o alvo, apreende-lo e receber, como recompensa, a tão almejada gota de suco de fruta, Aurora (a macaca do experimento), tinha apenas uma opção. Nem o joystick, nem mesmo os movimentos de eu braço biológico seriam mais capazes de realizar a tarefa. Agora, a única maneira de alcançar seu objetivo era operar aquela interface cérebro-máquina.
Somente com o pensamento!
[...] Aurora visava criar movimentos dos membros superiores com base na atividade elétrica cerebral. Aurora teria agora de imaginar os movimentos de seu braço e mão, de modo que o braço robótico, seu único meio de controlar os movimentos do cursor, pudesse realizar a tarefa motora necessária para a intersecção do alvo e o recebimento da recompensa. Seus pensamentos seriam agora o guia seguro para aquele braço robótico que tinha por missão, no lugar de seus próprios músculos, de mover o cursor até a posição ocupada pelo alvo. Como o alvo era um objeto virtual, ela precisava evocar um braço tocando uma esfera que na realidade só existia em sua imaginação.”
Bem, para finalizar esta pequena incursão pelo mundo das imagens, vou apelar para o trecho da contra capa do mesmo livro, onde esta escrito assim, pelo autor “sentado na varanda de sua casa de praia, de frente para seu oceano favorito, você um dia poderá conversar com uma multidão, fisicamente localizada em qualquer parte do planeta, por meio de uma nova versão da internet (“a brainet”), sem a necessidade de digitar ou pronunciar uma única palavra.
Nenhuma contração muscular envolvida. Somente através do seu pensamento”.
Veja transmissão cerebral entre ratos...creio que falta pouco...
http://www.telegraph.co.uk/science/science-news/9899906/Scientists-create-telepathic-connection.html
mehmetsimsek.net/.../Augments-Essential-Guide-to-Augmented-R...
Veja transmissão cerebral entre ratos...creio que falta pouco...
http://www.telegraph.co.uk/science/science-news/9899906/Scientists-create-telepathic-connection.html
mehmetsimsek.net/.../Augments-Essential-Guide-to-Augmented-R...